Ultra-wideband (UWB) technology is a wireless communication technology that uses a wide frequency band to transmit data. Unlike other wireless technologies such as Wi-Fi and Bluetooth, which use narrow frequency bands, UWB uses a broad frequency spectrum to achieve high data rates and precise location tracking.
Overview of UWB Technology
UWB technology transmits short-duration pulses of radio waves that spread over a wide frequency spectrum. These pulses are modulated with data, such as location information, and are transmitted at a very low power level. The receiver then uses the time delay between the transmitted and received pulses to calculate the distance between the transmitter and receiver. By using multiple transmitters and receivers, UWB can provide precise positioning and tracking capabilities.
UWB Frequency Spectrum
UWB technology operates over a wide frequency range, typically between 3.1 GHz and 10.6 GHz. This frequency range is divided into several sub-bands, each with a bandwidth of several hundred MHz. UWB devices use these sub-bands to transmit data in the form of short pulses.

Components Required for Installing a UWB Network
To install a UWB network, consist of the following components:
How UWB Meassures Locations
UWB (Ultra-Wideband) is different from other radio technologies in terms of how it encodes information in its signals. Unlike amplitude or frequency modulation, UWB uses short sequences of extremely narrow pulses (just 2 nanoseconds in duration) using techniques like binary phase-shift keying (BPSK) and/or burst position modulation (BPM) to encode data. These narrow pulses have sharp edges that make it possible to accurately determine arrival time and distance, even in the presence of signal reflections that cause multi-path effects.
Topologies used with UWB
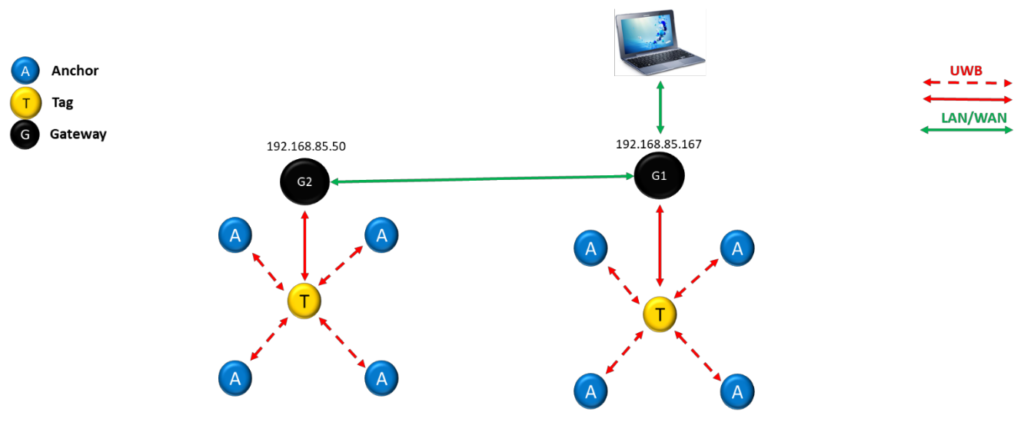
The Two-Way Ranging (TWR) method is used to determine the distance between a tag and an anchor in a UWB (Ultra-Wideband) system. This involves measuring the time it takes for UWB RF signals to travel back and forth (ToF) between the tag and anchor, and then multiplying that time by the speed of light. TWR is commonly used in applications such as keyless car entry systems to accurately and securely determine the distance between the car and the key fob. By using multiple anchors, each with its own antenna, the Two-Way Ranging (TWR) method can be used to precisely determine the position of mobile devices or other tags. By measuring the distance to three or more anchors with known locations, the device can accurately estimate its position. The device can then communicate the distance information via UWB or other wireless technologies to location-based applications or gateways, as depicted in Figures 4 and 5. However, the downside of using TWR for location measurement is that it requires frequent communication, which increases the power consumption of the tag and limits scalability.
Time Difference of Arrival (TDoA) is a highly scalable approach for determining the location of tags within a given area. This method only requires tags to transmit data once during the process, which allows them to consume very little power and therefore have a much longer battery life compared to other methods. In a UWB network, several anchors are strategically placed in known and fixed positions and are precisely time synchronized. When a mobile device sends out a signal, each anchor that receives the signal records the time of arrival based on the common synchronized time reference. The timestamps from all the anchors are then sent to a central location engine, which uses multilateration algorithms to calculate the location of the mobile device based on the time differences of the signal arrival at each anchor. As a result, the location engine can determine the 2D or 3D position of the mobile device accurately.
A Reverse Time Difference of Arrival (Reverse TDoA) system can also be implemented, which functions similar to GPS. In this system, the anchors transmit synchronized blinks with known and fixed offsets to prevent collisions, while the mobile devices use TDoA and multilateration algorithms to determine their location.
Phase Difference of Arrival (PDoA) This method enables two devices to calculate their relative positions without the need for any other infrastructure, using a combination of distance and directional information. This is very important for peer-to-peer applications or to reduce the amount of infrastructure that needs to be deployed. To use the Phase Difference of Arrival (PDoA) method, at least two antennae must be present on one of the devices involved. When this device receives a signal from the other device, it measures the difference in phase of the incoming signal at each antenna. Using this information, the device can determine the angle from which the signal arrived. By combining this with the distance information, the receiving device is able to determine both the direction and distance of the transmitting device.
UWB Applications
UWB technology has a wide range of applications in various industries, including industrial and private sectors. In the industrial sector, UWB is used for real-time location systems (RTLS), industrial automation, and mining. In the private sector, UWB is used for smart homes, retail, gaming, personal health and fitness, mobile and smartphones, and automotive.
